آدا لاولیس: با مخترع برنامه نویسی کامپیوتر آشنا شوید
آدا لاولیس: با مخترع برنامه نویسی کامپیوتر آشنا شوید

او خود را یک تحلیلگر و متافیزیک می نامید ، اما گاهی اوقات به عنوان "افسونگر اعداد" نامیده می شد - و امروز ، ما او را به عنوان اولین برنامه نویس رایانه در جهان می شناسیم. با آدا لاولیس ، ریاضیدان دنباله دار قرن نوزدهم که زمینه ساز علوم رایانه مدرن شد ، آشنا شوید.
 حکاکی آدا در 4 سالگی
حکاکی آدا در 4 سالگی تنها فرزند مشروع شاعر رمانتیک بدنام لرد بایرون ، آدا در 10 دسامبر 1815 متولد شد - تنها سه ماه قبل از اینکه بایرون در میان شایعات انگلیس را در تبعید ترک کند. رابطه رسوایی با خواهرش ، آگوستا لی (دخترش به نام او آگوستا نامگذاری شد ، اگرچه او همیشه با آدا همراه بود). اگرچه آدا هرگز با پدر بدنام خود ملاقات نکرد ، اما شهرت او زندگی او را تسخیر کرد ، که از طریق مبارزه بین احساسات و عقل شکل گرفته بود. همسر بایرون ، آنابلا میلبانک ، مصمم بود تا مطمئن شود که آدا هیچ شباهتی به پدرش ندارد و اصرار داشت که از ریاضیات درس بخواند تا از طعمه نیروهای "خطرناک و بالقوه مخرب" تخیل و شعر جلوگیری کند. (بایرون در مورد ارزش خود ، ظاهراً در مورد آدا گفت: "امیدوارم او شاعرانه نباشد ؛ هزینه ای که برای چنین مزایایی پرداخت می شود ، اگر مزایایی داشته باشد ، به گونه ای است که مرا مجبور می کند دعا کنم تا فرزندم از آنها فرار کند.") < /p>
اجازه تحصیل در ریاضیات برای دختری در آن زمان بسیار نادر بود و تحصیل آدا نه تنها مجاز ، بلکه تشویق کننده بود - دستاوردهای بعدی وی تصویری از آنچه زنان می توانند در صورت داشتن شانس به آنها برسند را به جهان نشان داد. به با این حال ، حتی از جوانی ، آدا در ادغام استعدادهای ریاضی خود با غرایز خلاقانه خود مهارت داشت. در دوازده سالگی ، او ماه ها روی طراحی یک ماشین پرنده کار کرد ، حتی کتابی به نام Flyology نوشت که برخی از یافته های او را نشان می داد. این پروژه زمانی متوقف شد که مادرش متوجه شد که این کار او را از مطالعات منطقی تر منحرف می کند ، اما این یک نمونه اولیه از "علم شاعرانه" بود که به آدا بال می داد. علی رغم اینکه برای اجتناب و حتی ترس از این مفهوم تربیت شده بود ، او تخیل را به عنوان "چیزی که به جهانهای غیب اطراف ما ، جهانهای علم نفوذ می کند" معرفی کرد - نه خطرناک و مخرب ، بلکه روشنگر فکری.
 پرتره آدا توسط مارگارت سارا کارپنتر (1836)
پرتره آدا توسط مارگارت سارا کارپنتر (1836) آدا کنتس لاولیس شد هنگام ازدواج با ارل لاولیس ، ویلیام کینگ - اما یک شخصیت مرد دیگر در زندگی او برای داستان او بسیار مهمتر بود. در جریان یک توپ در 17 سالگی ، آدا به ریاضیدان مشهور جهان چارلز بابیج معرفی شد ، که در برنامه های بلندپروازانه برای ایجاد یک ماشین محاسبه ساعت بزرگ غول پیکر غرق شده بود که او آن را موتور تحلیلی نامید. بابیج آنقدر تحت تأثیر ذهن درخشان آدا قرار گرفت که او مربی ، شریک و دوست مادام العمر شد و او را در مقطعی چنین توصیف کرد: "آن افسونگری که طلسم جادویی خود را در انتزاعی ترین علوم پرتاب کرده و با نیرویی آن را درک کرده است. چند عقل مردانه می توانست بر آن اعمال کند. " و در واقع ، درک و بیان آدا از پتانسیل موتور تحلیلی به زودیاز بیبیج پیشی گرفت.
آدا موتور تحلیلی را همان چیزی می دانست که ما اکنون آن را مدل اولیه برای رایانه های عمومی می نامیم ، و آنچه او "علم عملیات" نامیده است ، چیزی است که ما اکنون آن را محاسبات می نامیم. به آدا در یادداشتهای خود برای مقاله "طرح موتور تجزیه و تحلیل" ، توضیح داد که چگونه می توان از دستگاه برای دستکاری نه تنها اعداد ، بلکه داده هایی که با اعداد نشان داده می شوند استفاده کرد. او حتی روشی را برای محاسبه توالی اعداد برنولی با آن نوشت که اکنون به عنوان اولین برنامه کامپیوتری جهان شناخته شده است. آدا که از امکانات محروم بود ، با آینده نگری و استعداد معمولی خود نوشت:
در کنار پروژه موتور تحلیلی با بابیج ، Ada به طور فزاینده ای با مطالعه شیمی مغز-تلاش شخصی تر برای جلوگیری از "جنون" (در اصطلاح معاصر ، احتمالاً تمایلات افسردگی شیدایی که از پدرش به ارث رسیده است) که او می ترسید در انتظار او بود. در کمال تاسف ، تحقیقات او زمانی متوقف شد که وی در سال 1852 تنها در 36 سالگی بر اثر سرطان درگذشت ، در همان سن بایرون درگذشت. او به درخواست او در کنار او به خاک سپرده شد: شاعر و ریاضیدان ، در کنار هم. کاربردهای پیچیده علمی - یک قرن پس از مرگ وی انجام شد. یافته ها و گمانه زنی های او بر کار آلن توریگ بر روی اولین رایانه های مدرن در طول جنگ جهانی دوم تأثیر گذاشت و سرانجام موتور تحلیلی را زنده کرد. وزارت دفاع ایالات متحده یک زبان برنامه نویسی رایانه ای را به نام او نامگذاری کرد و او الهام بخش هر دختر باهوشی است که می خواهد در حوزه STEM نقش برجسته ای داشته باشد.
زنان پیشرو مورد علاقه شما در تاریخ چه کسانی هستند؟
اعتبار تصویر ویژه: ویکی مدیا
DRV8825: حامل راننده موتور پله ای با جریان بالا
DRV8825: حامل راننده موتور پله ای با جریان بالا
موتور پله ای-حالت دوقطبی-2.5A@45v peak-Ardu_Serie #59
سلام ، این یک افت عملکرد بالاتر است- در بسیاری از کاربردها جایگزین تخته های حامل راننده موتور پله ای A4988 می شود.
استفاده از آن ساده است و کاملاً قوی است. من از این راننده در پروژه تراز خودرو استفاده کردم.
آن را روی دو موتور پله ای 5 و 12 ولت آزمایش می کنم:

 و 5 ولت (.5A)
* x بلوز سیم
1 x 2.1mm x 5.5mm آداپتور برق </pre> <img src = ) درایور موتور پله ای DRV8825 با هیت سینک < /img>
درایور موتور پله ای DRV8825 با هیت سینک < /img>  آداپتور برق DC 100-240V آداپتور شارژر منبع
آداپتور برق DC 100-240V آداپتور شارژر منبع  www.aliexpress.com
www.aliexpress.com  کانکتور صفحه آداپتور برق DC 5.5 x 2.1 میلی متر
کانکتور صفحه آداپتور برق DC 5.5 x 2.1 میلی متر  28BYJ-48 سوپاپ دنده موتور Stepper DC 5V و 12V
28BYJ-48 سوپاپ دنده موتور Stepper DC 5V و 12V DRV8825-راه حل یکپارچه درایور موتور برای موتورهای پله ای دوقطبی
ویژگی ها < /h4> 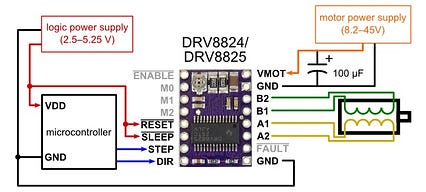
بطور طبیعی 1/32 در همان تنظیمات بلوز ، A4988 1/16 اجرا می شود ، که مستقیماً به حالت ساکت تر تبدیل می شود (به طور بالقوه) ؛
همچنین دارای یک فضای زیادی برای سرپوش amperage ؛
دستگاه (DRV8825) ادغام می کند:
i) دو پل NMOS H ii) حس فعلی iii) مدارهای تنظیم iv) نمایه ساز ریزدارای ولتاژ منبع تغذیه بین 8.2 تا 45 ولت ؛
قابلیت تأمین جریان خروجی تا 2.5 A در مقیاس کامل ؛
یک رابط ساده STEP/DIR امکان رابط آسان با مدار کنترل کننده را می دهد ؛
نمایه ساز داخلی می تواند مرحله بسیار کوچک را بدون نیاز به پردازنده برای کنترل سطح فعلی اجرا کند ؛
< p> تنظیم فعلی بسیار قابل تنظیم است ؛سه حالت پوسیدگی: پوسیدگی سریع ، آهسته و مختلط ؛
حالت خواب با توان کم گنجانده شده است که به سیستم اجازه می دهد قدرت هنگام رانندگی با موتور ؛
مناسب برای موتورهای پله ای دو فاز و چهار سیم ؛ جریان خروجی در سیم پیچ ؛ یک رابط ساده STEP/DIR امکان اتصال آسان T به مدارهای کنترل کننده را می دهد. پین های حالت امکان پیکربندی A = 25 ° C
را فراهم می کند به عنوان مثال ، رانندگی با موتور در حالت چهار مرحله ای ، با استفاده از چهار جریان مختلف ، به موتور 200 گام در هر دور چرخش 800 میکروپله در هر دور موتور می دهد. سطوح.
ورودی های انتخابگر وضوح (اندازه مرحله) (MODE0 ، MODE1 و MODE2) مطابق جدول زیر ، انتخاب از بین وضوح شش مرحله ای را فعال می کند. هر سه ورودی انتخابگر دارای مقاومت های کششی 100kO داخلی هستند ، بنابراین خروج این سه پین انتخاب میکرو مرحله ای قطع شده و در حالت تمام مرحله نتیجه می گیرد. برای عملکرد صحیح حالتهای میکرواستریپ ، حد فعلی باید به اندازه کافی پایین تنظیم شود تا محدودیت جریان درگیر شود. در غیر این صورت ، سطح جریان متوسط به درستی حفظ نمی شود و موتور از مراحل خرد می گذرد.
منطق نمایه ساز داخلی در DRV8825 تعدادی تنظیمات مختلف گام را امکان پذیر می کند. پین های MODE0 تا MODE2 برای پیکربندی قالب مرحله مانند جدول 1 استفاده می شود.
جدول 1. فرمت مرحله MODE0 MODE1 وضوح Microstep MODE2 کم کم کم پله کامل بالا پایین پایین نیم مرحله کم بالا پایین 1/4 مرحله بالا بالاپایین 1/8 مرحله کم کم بالا 16/1 مرحله بالا کم بالا 1/32 مرحله کم بالا بالا 1/32 مرحله High High High 1/32 مرحلهورودی های کنترل
هر پالس ورودی STEP مربوط به یک میکروپله موتور پله ای در جهت انتخاب شده توسط پین DIR است. این ورودی ها به طور پیش فرض از طریق مقاومت های کششی داخلی 100k به سمت پایین کشیده می شوند. اگر فقط می خواهید چرخش را در یک جهت انجام دهید ، می توانید DIR را قطع کنید.
تراشه دارای سه ورودی مختلف برای کنترل حالتهای قدرت خود است: RESET ، SLEEP و ENBL. برای اطلاعات بیشتر در مورد این حالت های قدرت ، به برگه داده مراجعه کنید. لطفاً توجه داشته باشید که راننده پین SLEEP را از طریق یک مقاومت کششی داخلی 1MO به پایین می کشد و پین های RESET و ENBL را از طریق مقاومت های کششی داخلی 100k به سمت پایین می کشد. این حالت های پیش فرض RESET و SLEEP مواردی هستند که مانع از عملکرد راننده می شوند. هر دو این پین ها باید بالا باشند تا درایور فعال شود (می توان آنها را مستقیماً به ولتاژ منطقی "بالا" بین 2.2 تا 5.25 ولت متصل کرد ، یا می توان آنها را به صورت پویا از طریق اتصال به خروجی های دیجیتال MCU کنترل کرد). حالت پیش فرض پین ENBL این است که درایور را فعال کنید ، بنابراین این پین می تواند قطع شود.
توجه: جریان سیم پیچ می تواند بسیار متفاوت از جریان منبع تغذیه باشد ، بنابراین نباید از جریان استفاده کنید اندازه گیری در منبع تغذیه برای تنظیم حد فعلی. مکان مناسب برای قرار دادن متر کنونی شما به صورت سری با یکی از سیم پیچ های موتور پله ای شما است.
در اینجا ویدیو آمده است: راننده IC دارای حداکثر جریان 2.5 آمپر در سیم پیچ است ، هنگام کار با این محصول و سایر اجزای متصل به آن مراقب باشید.
برای پروژه تعادل خودرو من یک NEMA 17 با درجه 0.3 آمپر ، زاویه پله 1.8 درجه دارم ؛
امیدوارم این به هر کس دیگری که ممکن است راننده پله ای یکسانی داشته باشد کمک کند.
فقط می خواستم با تشکر از اینکه با ما بودید تشکر کنم! خداحافظ!
بارگیری همه پرونده های این پروژه
منابع و اعتبارات:
DRV8825 Stepper Motor Driver Carrier ، High current
Arduino Stepper آموزش رانندگان-2/2 توسط R Jordan Kreindler در Arduino
مبانی موتور پله ای-5 سیم موتور تک قطبی/دوقطبی
مبانی موتور پله ای-4 سیم موتور دوقطبی
-منتشر شده در اکتبر 2018-
پست های مرتبط:
Meet DoRobot-Assembly Techniques J3 Caterpillar-Crawler-Chassis v 1.0-ArduSerie#46
L9100S- راننده اسباب بازی آسان برای استفاده-اسباب بازی کم ولتاژ- h- پل- آسان برای استفاده- موتور-.8A@12v peak-Ardu_Serie#47
EASYDRIVER: 4-Wire-Stepper Motor Driver- طراحی برایان اشمالز بر روی A3967 IC-Bi-Polar Motors-.75A@30v peak-ساختن اینها نسیم! Ardu_Serie #48
DRV8825-Carrier High Stepper Motor Driver Carrier-Stepper Motor-حالت دوقطبی-2.5A@45v peak-Ardu_Serie #59
L298N-Dual Full-Bridge Driver-Darlington آرایه های ترانزیستور بر اساس-3A@50v peak-Ardu-Serie#52
TB6612FNG: Dual DC Motor Driver-SparkFun Motor Driver-3.2A@13.5v peak-Ardu-Serie#49
A4988 - استپر موتور راننده حامل - Allegro's A4988 - دوقطبی استپر موتور راننده - 2A@35v قله-Ardu-Serie#53
Adafruit Motor Shield v1 & v2–4 DC Motors یا 2 Stepper Motor یا 2 Servos-1.2A@25v & 3.2A@15v peak-Ardu-Serie#54
IFR 520 MOS-Module + DoRobot-Switch Heavy DC Load-10A@100v peak-Ardu-Serie#60
L9110 H-bridge module + DoRobot-DC Stepper Motor Board Board-.8A @12 v peak- Ardu_Serie#62
BTS7960B- High Bridge PN Half Bridge- برنامه های کاربردی درایو موتور با جریان بالا- NovalithIC TM- 43A@24v peak- ArduSerie#64
VNH2SP30- Monster Moto Shield-از این برد در برنامه های با تقاضای زیاد استفاده کنید-رانندگان موتور کامل پل-30A@16v peak-30 Ardu_Serie#63